Advanced
Ages
12+
Competition
Ready
Mini Drone X-2
$199.99
starstarstarstarstar
(42 reviews)
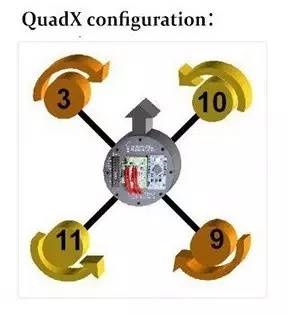
Our flagship kit — build a fully functional quadcopter from scratch! This is a PCB-frame design: the blue flight-controller board itself forms the central frame, with four arms extending out to four motors and props. It runs MultiWii firmware on an Arduino/ATmega flight controller, tuned from a PC ground station. Learn aerodynamics, motor control, PID tuning, and flight physics. Compete in drone racing and obstacle courses. The most advanced STEM kit in our lineup.
timer
Build Time
10-14 Hours
handyman
Parts Count
75+ Components
code
Languages
C++ / Python
memory
Controller
Flight Controller
local_shipping
Free shipping on 5+ kits
inventory_2 All
parts, tools & transmitter included
emoji_events
Competition eligible — Drone Racing